Work Experience

Research Assistant
Jan 2025 – Aug 2025
Robotics Institute, University of Guelph
Python, C++, Docker, ROS2, FastAPI, MuJoCo, Yolov9
Developed intelligent path planning and perception systems for autonomous robots in agriculture. Focused on real-time decision making, data-driven automation, and advanced visual perception for robotic harvesting.

Undergraduate Research Assistant
May 2024 – Aug 2024
Robotics Institute, University of Guelph
Python, C++, Docker, ROS2, Git
Engineered a teleoperation system for robotics research, focusing on automation and real-time control. Developed robust communication and state management for autonomous harvesting. Gained experience in robotics systems integration.
Projects

Reinforcement Learning Arm Controller
Python, Isaac Lab, Isaac Sim, RSL-RL, PPO
Trained obstacle-aware arm reaching policies in Isaac Lab + Isaac Sim using RSL-RL PPO. Built a staged curriculum to improve performance as obstacles increased, and used TensorBoard to track success, collisions, and reward stability.

Gazebo Moveit2 Motion Planner
C++, ROS2, MoveIt2, OMPL, IKFast, RViz2, Gazebo, Docker
Developed a full-stack simulation of a 6-DOF robotic arm for autonomous motion using ROS2 and MoveIt2. Enabled fast, accurate path planning and real-time perception with OMPL, IKFast, and Octomap-based collision checking.



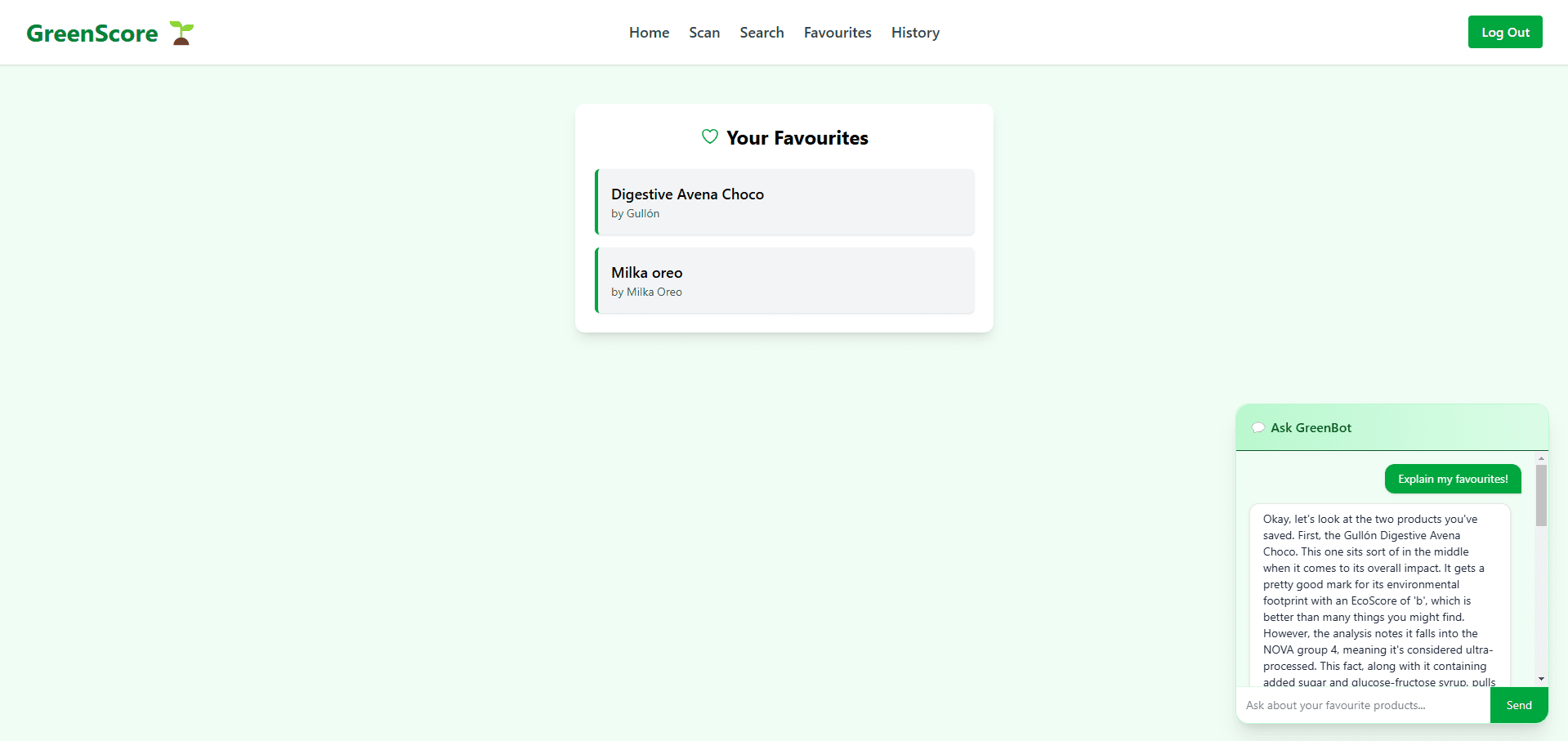
GreenScore - GDSC Hacks
React, FastAPI, MongoDB, Gemini AI, Firebase, Python
Built an AI platform that rates food products on ethics and sustainability using barcode scans and product lookup. Enabled secure, real-time user experience with a responsive React/FastAPI interface and robust cloud integration.
